2026
|
A Nonlinear MPC Framework for Loco-Manipulation of Quadrupedal Robots with Non-Negligible Manipulator Dynamics Ruturaj Sambhus, Kapi Ketan Mehta, Ali MirMohammad Sadeghi, Basit Muhammad Imran, Jeeseop Kim, Taizoon Chunawala, Vittorio Pastore, Sujith Vijayan, and Kaveh Akbari Hamed IEEE Robotics and Automation Letters [VIDEO] [ARXIV] [DOI] [ABSTRACT]Loco-manipulation tasks performed by legged robots introduce additional complexity, necessitating computationally efficient MPC algorithms capable of handling high-degree-of-freedom (DoF) models. This letter presents a computationally efficient nonlinear MPC (NMPC) framework tailored for locomanipulation tasks of quadrupedal robots equipped with robotic manipulators whose dynamics are non-negligible relative to those of the quadruped. The proposed framework adopts a decomposition strategy that couples locomotion template models—such as the single rigid body (SRB) model—with a full-order dynamic model of the robotic manipulator for torque-level control. This decomposition enables efficient real-time solution of the NMPC problem in a receding horizon fashion. |
2025

|
Hybrid Data-Driven Predictive Control for Robust and Reactive Exoskeleton Locomotion Synthesis Kejun Li, Jeeseop Kim, Maxime Brunet, Marine Petriaux, and Aaron D. Ames 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) [VIDEO] [ARXIV] [DOI] [ABSTRACT]Robust bipedal locomotion in exoskeletons requires the ability to dynamically react to changes in the environment in real time. This paper introduces the hybrid data-driven predictive control (HDDPC) framework, an extension of the data-enabled predictive control, that addresses these challenges by simultaneously planning foot contact schedules and continuous domain trajectories. |
|
Safety-Critical and Distributed Nonlinear Predictive Controllers for Teams of Quadrupedal Robots Basit M. Imran, Jeeseop Kim, Taizoon A. Chunawala, Alexander Leonessa, and Kaveh Akbari Hamed IEEE Robotics and Automation Letters [VIDEO] [ARXIV] [DOI] [ABSTRACT]This paper develops computationally efficient, distributed NMPC algorithms that incorporate CBF-based collision safety guarantees within a consensus protocol, enabling longer planning horizons for safe cooperative locomotion under disturbances and rough terrain conditions. The optimal trajectories generated by the DNMPCs are tracked using full-order, nonlinear whole-body controllers at the low level. |
|
Robust Adaptive Safe Robotic Grasping with Tactile Sensing Yitaek Kim, Jeeseop Kim, Albert Hao Li, Aaron D. Ames, and Christoffer Sloth 2025 European Control Conference (ECC) [VIDEO] [ARXIV] [DOI] [ABSTRACT]Robotic grasping requires safe force interaction to prevent a grasped object from being damaged or slipping out of the hand. In this vein, this paper proposes an integrated framework for grasping with formal safety guarantees based on Control Barrier Functions. |
|
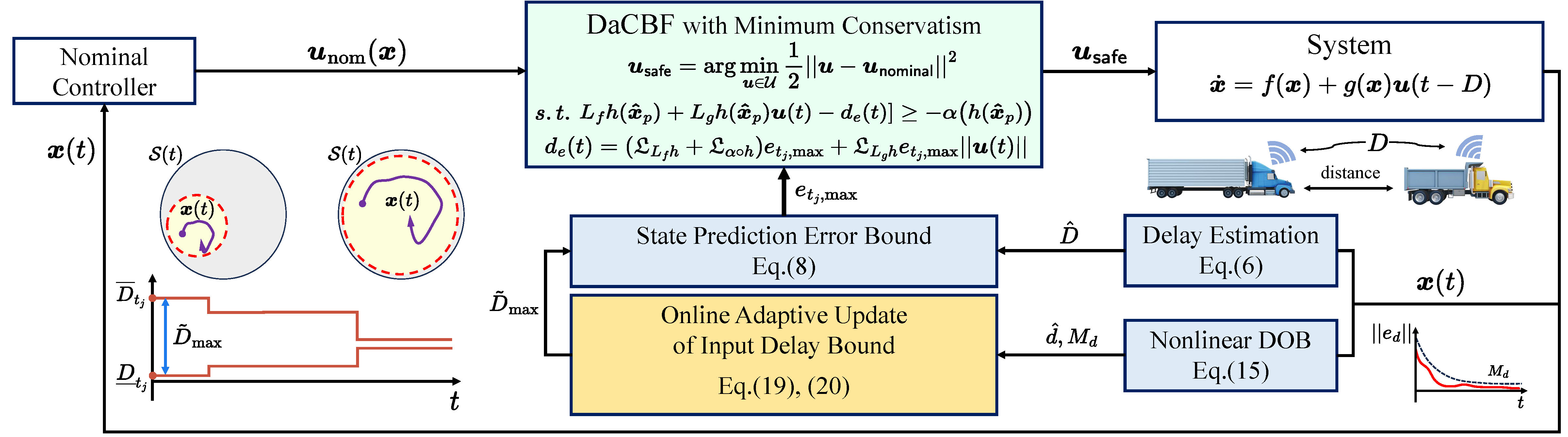
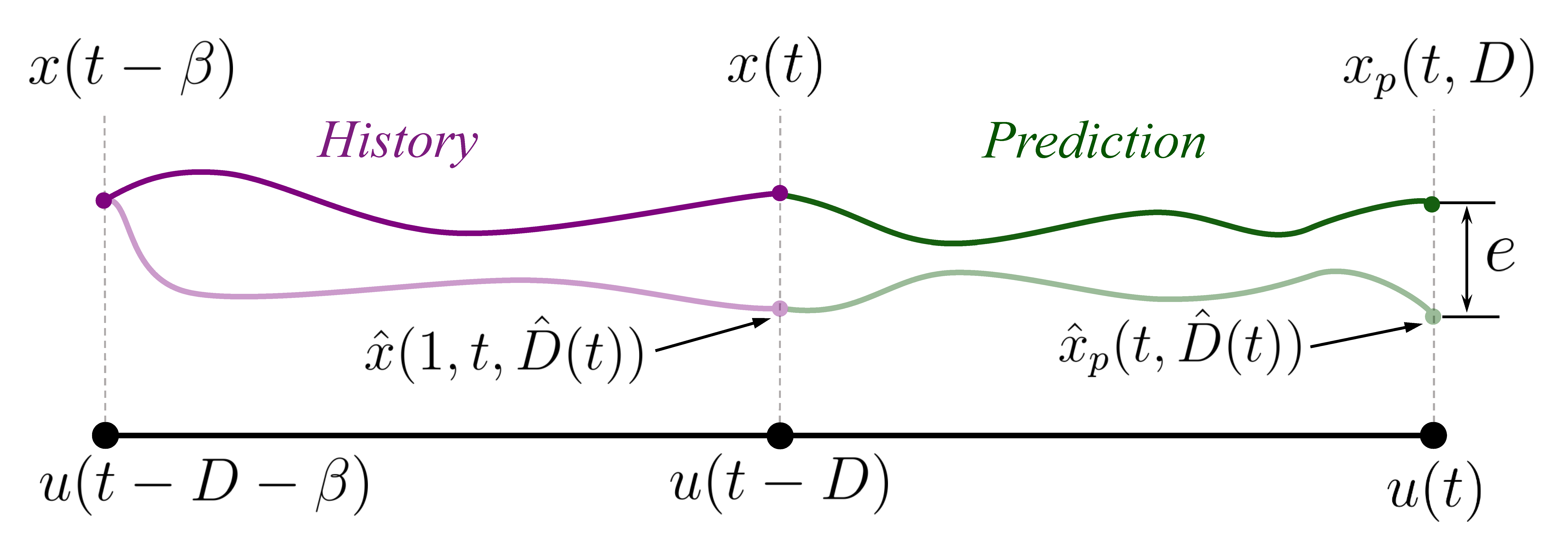
Minimizing Conservatism in Safety-Critical Control for Input-Delayed Systems via Adaptive Delay Estimation Yitaek Kim, Ersin Das, Jeeseop Kim, Aaron D. Ames, Joel Burdick, and Christoffer Sloth 2025 European Control Conference (ECC) [ARXIV] [DOI] [ABSTRACT]This paper proposes an online adaptive safety control framework for reducing the conservatism of DaCBFs. The main idea is to reduce the maximum delay estimation error bound so that the state prediction error bound is monotonically non-increasing. To this end, we first leverage the estimation error bound of a disturbance observer to bound the state prediction error. Second, we design two nonlinear programs to update the maximum delay estimation error bound satisfying the prediction error bound, and subsequently update the maximum state prediction error bound used in DaCBFs. |

|
Design and Control of the Humanoid Robot ACHILLES: Real-Time Gait Generation for Dynamic Locomotion Adrian B. Ghansah, Jeeseop Kim, and Aaron D. Ames Ongoing [VIDEO] [ABSTRACT]TBD |
|
Safety-critical Locomotion of Biped Robots in Infeasible Paths: Overcoming Obstacles during Navigation toward Destination Jaemin Lee, Min Dai, Jeeseop Kim, and Aaron D. Ames 2025 IEEE International Conference on Robotics and Automation (ICRA) [VIDEO] [ARXIV] [DOI] [ABSTRACT]Our research focus is on achieving safe and robust locomotion where robots confront unavoidable obstacles en route to their designated destination. Through the utilization of outcomes from physical interactions with unknown objects, we establish a hierarchy among the safety-critical conditions avoiding the obstacles. Robust bipedal locomotion is achieved by utilizing the Hybrid Linear Inverted Pendulum model, coupled with a disturbance observer. |
|
A Distributed Layered Planning and Control Algorithm for Teams of Quadrupedal Robots: An Obstacle-Aware Nonlinear MPC Approach Basit M. Imran, Randall T. Fawcett, Jeeseop Kim, Alexander Leonessa, Kaveh Akbari Hamed Journal of Dynamic Systems, Measurement, and Control [VIDEO] [DOI] [ABSTRACT]This paper aims to develop a distributed layered control framework for the navigation, planning, and control of multi-agent quadrupedal robots subject to environments with uncertain obstacles and various disturbances. At the highest layer of the proposed layered control, a reference path for all agents is calculated, considering artificial potential fields under a priori known obstacles. Secondly, in the middle layer, we employ a distributed nonlinear model predictive control (NMPC) scheme to ensure the feasibility of the gaits and collision avoidance. |
2024

|
Dynamic Walking on Highly Underactuated Point Foot Humanoids: Closing the Loop between HZD and HLIP Adrian B. Ghansah, Jeeseop Kim, Kejun Li, and Aaron D. Ames 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) [VIDEO] [ARXIV] [DOI] [ABSTRACT]Realizing bipedal locomotion on humanoid robots with point feet is especially challenging due to their highly underactuated nature, high degrees of freedom, and hybrid dynamics resulting from impacts. With the goal of addressing this challenging problem, this paper develops a control framework for realizing dynamic locomotion and implements it on a novel point foot humanoid: ADAM. To this end, we close the loop between Hybrid Zero Dynamics (HZD) and Hybrid linear inverted pendulum (HLIP) based step length regulation. |

|
Safety-critical Autonomous Inspection of Distillation Columns using Quadrupedal Robots Equipped with Roller Arms Jaemin Lee, Jeeseop Kim, and Aaron D. Ames 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) [VIDEO] [ARXIV] [DOI] [ABSTRACT]This paper proposes a comprehensive framework designed for the autonomous inspection of complex environments, with a specific focus on multi-tiered settings such as distillation column trays. Leveraging quadruped robots equipped with roller arms, and through the use of onboard perception, we integrate essential motion components including: locomotion, safe and dynamic transitions between trays, and intermediate motions that bridge a variety of motion primitives. |
|
Data-Driven Predictive Control for Robust Exoskeleton Locomotion Kejun Li, Jeeseop Kim, Xiaobin Xiong, Kaveh Akbari Hamed, Yisong Yue, and Aaron D. Ames 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) [VIDEO] [ARXIV] [DOI] [ABSTRACT]Exoskeleton locomotion must be robust while being adaptive to different users with and without payloads. To address these challenges, this work introduces a data-driven predictive control (DDPC) framework to synthesize walking gaits for lower-body exoskeletons. The proposed approach leverages DDPC through a multi-layer architecture. At the top layer, DDPC serves as a planner employing Hankel matrices and a state transition matrix to generate a data-driven model that can learn and adapt to varying users and payloads. |
|
A Data-driven Method for Safety-critical Control: Designing Control Barrier Functions from State Constraints Jaemin Lee, Jeeseop Kim, and Aaron D. Ames 2024 American Control Conference (ACC) [ARXIV] [DOI] [ABSTRACT]This paper addresses the challenge of integrating explicit hard constraints into the control barrier function (CBF) framework for ensuring safety in autonomous systems, including robots. We propose a novel data-driven method to derive CBFs from these hard constraints in practical scenarios. Our approach assumes that the forward invariant safe set is either a subset or equal to the constrained set. |
|
Robust Safety-Critical Control for Input-Delayed System with Delay Estimation Yitaek Kim, Jeeseop Kim, Aaron D. Ames, and Christoffer Sloth 2024 European Control Conference (ECC) [DOI] [ABSTRACT]This paper proposes a Control Barrier Function (CBF)-based delay adaptive controller design to accomplish robust safety in the presence of unknown but bounded constant input delay. To this end, we first estimate the input delay by using a gradient descent method minimizing the discrepancy between the current state and the estimated state. Then, we establish the state prediction feedback with the estimated input delay, which is leveraged to attenuate the effect of the input delay. |
|
Safety-Critical Coordination of Legged Robots via Layered Controllers and Forward Reachable Set based Control Barrier Functions Jeeseop Kim, Jaemin Lee, and Aaron D. Ames 2024 IEEE International Conference on Robotics and Automation (ICRA) [VIDEO] [ARXIV] [DOI] [ABSTRACT]This paper presents a safety-critical approach to the coordination of robots in dynamic environments. To this end, we leverage control barrier functions (CBFs) with the forward reachable set to guarantee the safe coordination of the robots while preserving a desired trajectory via a layered controller. The top-level planner leverages high-order CBFs based on the forward reachable set to ensure safety-critical coordination control, i.e., guarantee the safe coordination of the robots during locomotion. |
|
Safety-critical Control of Quadrupedal Robots with Rolling Arms for Autonomous Inspection of Complex Environments Jaemin Lee, Jeeseop Kim, Wyatt Ubellacker, Tamas G. Molnar, and Aaron D. Ames 2024 IEEE International Conference on Robotics and Automation (ICRA) [VIDEO] [ARXIV] [DOI] [ABSTRACT]This paper presents a safety-critical control framework tailored for quadruped robots equipped with a roller arm, particularly when performing locomotive tasks such as autonomous robotic inspection in complex, multi-tiered environments. To address this problem, our framework encompasses the following key elements: 1) Trajectory generation for seamless transitions between columns, 2) Foothold re-planning in regions deemed unsafe, 3) Safety-critical control incorporating control barrier functions, 4) Gait transitions based on safety levels, and 5) A low-level controller. |
2023
|
Humanoid Robot Co-Design: Coupling Hardware Design with Gait Generation via Hybrid Zero Dynamics Adrian B. Ghansah, Jeeseop Kim, Maegan Tucker, and Aaron D. Ames 2023 62nd IEEE Conference on Decision and Control (CDC) [VIDEO] [ARXIV] [DOI] [ABSTRACT]Selecting robot design parameters can be challenging since these parameters are often coupled with the performance of the controller and, therefore, the resulting capabilities of the robot. This leads to a time-consuming and often expensive process whereby one iterates between designing the robot and manually evaluating its capabilities. In an effort to streamline the design process of bipedal robots, and maximize their performance, this paper presents a systematic framework for the co-design of humanoid robots and their associated walking gaits. |
|
Hierarchical Relaxation of Safety-critical Controllers: Mitigating Contradictory Safety Conditions with Application to Quadruped Robots Jaemin Lee, Jeeseop Kim, and Aaron D. Ames IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) [VIDEO] [ARXIV] [DOI] [ABSTRACT]The safety-critical control of robotic systems often must account for multiple, potentially conflicting, safety constraints. In particular, Control Barrier Function (CBFs) provide a means to encode safety as constraints in a Quadratic Program (QP). However, the QP problem becomes infeasible when the safety conditions cannot be simultaneously satisfied. To resolve this potential infeasibility, we introduce a hierarchy between the safety conditions. |

|
Safety-Critical Coordination for Cooperative Legged Locomotion via Control Barrier Functions Jeeseop Kim, Jaemin Lee, and Aaron D. Ames IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) [VIDEO] [ARXIV] [DOI] [ABSTRACT]This paper presents a safety-critical approach to the coordinated control of cooperative robots locomoting in the presence of fixed (holonomic) constraints. To this end, we leverage control barrier functions (CBFs) to ensure the safe cooperation of the robots while maintaining a desired formation and avoiding obstacles. This planner leverages CBFs to ensure safety-critical coordination control, i.e., guarantee safety of the collaborative robots during locomotion. |
|
Layered Control for Cooperative Locomotion of Two Quadrupedal Robots: Centralized and Distributed Approaches Jeeseop Kim, Randall T. Fawcett, Vinay R. Kamidi, Aaron D. Ames, and Kaveh Akbari Hamed IEEE Transactions on Robotics [VIDEO] [ARXIV] [DOI] [ABSTRACT]This paper presents a layered control approach for real-time trajectory planning and control of robust cooperative locomotion by two holonomically constrained quadrupedal robots. A novel interconnected network of reduced-order models, based on the single rigid body (SRB) dynamics, is developed for trajectory planning purposes. At the higher level of the control architecture, two different model predictive control (MPC) algorithms are proposed to address the optimal control problem of the interconnected SRB dynamics: centralized and distributed MPCs. |

|
Distributed Data-Driven Predictive Control for Multi-Agent Collaborative Legged Locomotion (2023 IEEE ICRA Outstanding Paper Award) Randall T. Fawcett, Leila Amanzadeh, Jeeseop Kim, Aaron D. Ames, and Kaveh Akbari Hamed IEEE International Conference on Robotics and Automation (ICRA) [VIDEO] [ARXIV] [DOI] [ABSTRACT]The aim of this work is to define a planner that enables robust legged locomotion for complex multi-agent systems. To this end, we employ a methodology based on behavioral systems theory to model the sophisticated and high-dimensional structure induced by the holonomic constraints. The resulting model is then used in tandem with distributed control techniques. Finally, this distributed model is framed in the context of a predictive controller, resulting in a robustly stable method for trajectory planning. |
2022
|
Thesis |
Collaborative Locomotion of Quadrupedal Robots: From Centralized Predictive Control to Distributed Control Jeeseop Kim Virginia Tech [LINK] |
|
Distributed quadratic programming-based nonlinear controllers for periodic gaits on legged robots Vinay R. Kamidi, Jeeseop Kim, Randall T. Fawcett, Aaron Ames, and Kaveh Akbari Hamed IEEE Control Systems Letters [VIDEO] [DOI] [ABSTRACT]This paper presents a formal foundation to systematically decompose QP-based centralized nonlinear controllers into a network of lower-dimensional local QPs, with application to legged locomotion. The proposed approach formulates a feedback structure between the local QPs and assumes a one-step communication delay protocol. The paper shows that the proposed distributed QPs have considerably less computation time and reduced noise propagation sensitivity than the centralized QP. |
|
Cooperative locomotion via supervisory predictive control and distributed nonlinear controllers Jeeseop Kim, and Kaveh Akbari Hamed Journal of Dynamic Systems, Measurement, and Control [VIDEO] [DOI] [ABSTRACT]An innovative network of reduced-order models subject to holonomic constraints, referred to as interconnected linear inverted pendulum (LIP) dynamics, is presented to study cooperative locomotion. The higher level of the proposed algorithm employs a supervisory controller, based on event-based model predictive control (MPC), to effectively compute the optimal reduced-order trajectories. The lower level of the proposed algorithm employs distributed nonlinear controllers to reduce the gap between reduced- and full-order complex models of cooperative locomotion. |
2021
|
Real-time planning and nonlinear control for quadrupedal locomotion with articulated tails (ASME Dynamic Systems & Control Division Rudolf Kalman Best Paper Award) Randall T. Fawcett, Abhishek Pandala, Jeeseop Kim, and Kaveh Akbari Hamed Journal of Dynamic Systems, Measurement, and Control [VIDEO] [DOI] [ABSTRACT]The MPC framework at the high level is developed for an innovative reduced-order linear inverted pendulum (LIP) model that is augmented with the tail dynamics to compute the optimal motion of the center of mass (COM) and tail trajectories. At the lower level of the control scheme, a nonlinear controller is implemented through the use of quadratic programming (QP) and virtual constraints to force the full-order dynamical model to track the prescribed optimal trajectories of the COM and tail. |
2020
|
Quadrupedal locomotion via event-based predictive control and QP-based virtual constraints Kaveh Akbari Hamed, Jeeseop Kim, and Abhishek Pandala IEEE Robotics and Automation Letters [VIDEO] [ARXIV] [DOI] [ABSTRACT]The higher level of the proposed control scheme is developed based on an event-based MPC that computes the optimal center of mass (COM) trajectories for a reduced-order linear inverted pendulum (LIP) model. The asymptotic stability of a desired target point for the reduced-order model under the event-based MPC approach is investigated. To bridge the gap between reduced- and full-order models, QP-based virtual constraint controllers are developed at the lower level of the proposed control scheme. |
2017
|
Thesis |
Improvement of Humanoid Gait Control using Actuator Deformation Model Jeeseop Kim Seoul National University [LINK] |
|
Application of robot manipulator for cardiopulmonary resuscitation Jaesug Jung, Jeeseop Kim, Sanghyun Kim, Woon Yong Kwon, Sang Hoon Na, Kyung Su Kim, Gil Joon Suh, Byeong Wook Yoo, Jin Woo Choi, Jung Chan Lee and others 2016 International Symposium on Experimental Robotics [VIDEO] [DOI] [ABSTRACT]CPR is one of the most important treatments which serves to save patients in cardiac arrest. The proposed robot CPR system attempts to overcome the limitations of current CPR methods in two aspects. First, it can provide much more consistent CPR than humans in terms of strength and timing. Second, biological data of a patient can be used to determine the best compression point during CPR. The feasibility of the proposed system is demonstrated through experiments: one simulation on a mannequin and two animal tests. We collaborated with Seoul National University, College of Medicine. |
2016
|
Improvement of humanoid walking control by compensating actuator elasticity Jeeseop Kim, Mingon Kim, and Jaeheung Park IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids) [VIDEO] [DOI] [ABSTRACT]The actuators in humanoid robots inevitably have compliance in their joint mechanisms. The joint elasticity often negatively affects static and dynamic performance of the robot. We modeled the joint deformation and proposed its compensation method to improve walking control performance and stability. The proposed algorithm is implemented on our humanoid robot and its performance is demonstrated by improved stability of walking. |
Theses
- J. Kim., “Collaborative Locomotion of Quadrupedal Robots: From Centralized Predictive Control to Distributed Control”, Doctoral Dessertation, Dept. of Mechanical Engineering, Virginia Tech, Virginia, August 2022.
[LINK][PDF] - J. Kim., “Improvement of Humanoid Gait Control using Actuator Deformation Model”, Master Thesis, Dept. of Transdisciplinary Studies, Seoul National University, Seoul, South Korea, February 2017.
[PDF]